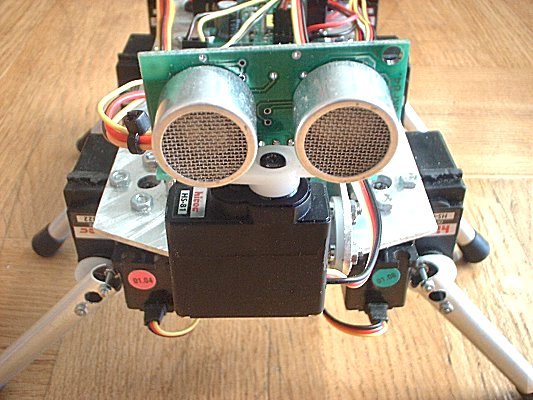
Genom att svepa med huvudets ultraljudssensor (SRF04) i sidled mäter roboten avstånd
till föremål inom ett område framför sig, och genom att bocka ner huvudet och mäta
avståndet till underlaget kan den undvika att ramla ner för trappor och andra stup.
By sweeping the heads ultrasonic ranger (SRF04) from side to side, distances to objects
in an area in front of the robot is measured, and by tilting the head down and measuring
the distance to the underlying surface it can avoid falling down stairs and other steep drops.
|

