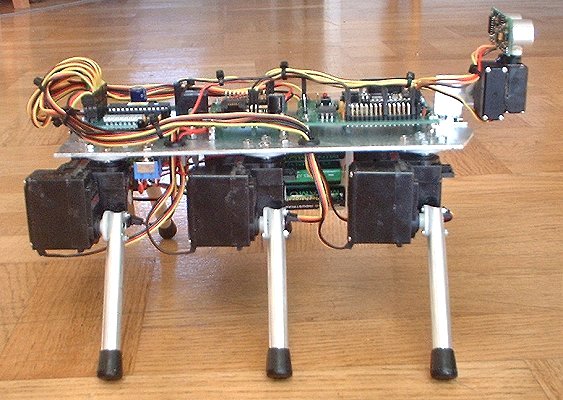
Varje ben styrs av två servon, för lyft respektive farmåt/bakåt-rörelse. Tre ben i taget (fram- och
bakbenet på ena sidan och mittbenet på andra sidan) lyfts och flyttas framåt, medan de tre
andra är nedsatta och rör sig bakåt, alternating tripod gait.
Each leg has two servos, one for lift and one for forward/backward motion. Three legs (front and
back legs on one side and the middle leg on the other side) are lifted at a time and moved for-
ward, while the other three legs are down and moving backwards, alternating tripod gait.
|

