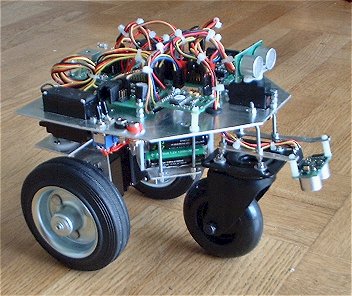
En ultraljudssensor mäter avstånd framåt, och en nedåtriktad
känner av trösklar och annat framför framhjulet.
One sonar module measures forward distances, and another one
pointed downwards detects thresholds and other unevenness
in front of the front wheel.
|

