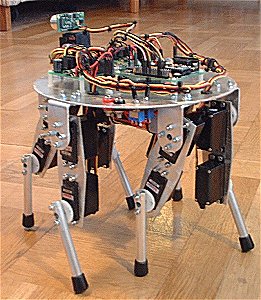
Tre ben i en triangel runt roboten lyfts och
flyttas framåt medan de tre andra är nedsatta
och rör sig bakåt, alternating tripod gait.
Three legs in a triangle around the robot are
lifted at a time and moved forward, while the
other three legs are down and moving
backwards, alternating tripod gait.
|

